
En esta experiencia conoceremos el funcionamiento del sensor de aparcamiento de un coche. Empleando el microcontrolador Arduino Uno y diferentes componentes electrónicos, construiremos un sistema que muestre un aviso luminoso cuando nos acercamos a un obstáculo. Será necesario cargar un sencillo programa en la placa Arduino Uno para que nuestro sistema simule el funcionamiento del sensor de aparcamiento de un coche.

Cesta de materiales
Presiona en los puntos interactivos de la imagen.
Manos a la obra
- Paso 1
-
- Para aprender el funcionamiento del sensor ultrasónico que emplean los coches para detectar los obstáculos próximos y facilitar el aparcamiento, emplearemos el microcontrolador Arduino Uno.
- La placa Arduino Uno permite crear un circuito electrónico con diferentes componentes electrónicos (sensor de ultrasonidos, luces led, resistencias y cableado) y subir un código o programa a la placa que controle el funcionamiento del circuito. En esta microsecuencia construiremos un circuito que simule el funcionamiento del sensor de aparcamiento de un coche y después subiremos la placa al programa que controle su funcionamiento (programa facilitado en la microsecuencia).
- Paso 2
-
- Para comenzar, necesitamos la placa del microcontrolador Arduino Uno y la placa protoboard donde conectaremos los diferentes componentes electrónicos.
- Para que sea más sencillo seguir los pasos del montaje del circuito, las imágenes están realizadas con un simulador de diseño de circuitos en línea (Tinkercad).
Imaxe
El primer paso es darle corriente a placa protoboard. Para eso necesitamos dos cables (macho-macho) de color negro y morado. Haremos las conexiones de la siguiente forma:
- Conexión con 5V (cable morado): Un extremo del cable morado lo conectaremos en la placa Arduino Uno en el pin 5V.
El otro extremo del cable morado lo conectaremos en la placa protoboard en la fila positiva, señalada con un símbolo de más de color rojo, en la fila 1 (cerca de la columna con letra j).
- Conexión con la tierra (cable negro): Un extremo del cable negro lo conectaremos en la placa Arduino Uno en el pin GND (próximo al pin 5V).
El otro extremo del cable negro lo conectaremos en la placa protoboard en la fila negativa, señalada con un símbolo menos de color azul, en la fila 1 (cerca de la columna con letra j).
Con esto la placa protoboard ya tiene conexión de corriente de 5V en la fila positiva y conexión con la tierra de la placa Arduino en la fila GND.
Imaxe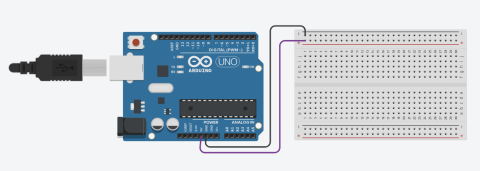
- Paso 3
-
El sensor de cercanías tiene cuatro pins: VCC (alimentación de corriente), Trig (Pin de entrada), Echo (Pin de salida), Gnd (Conexión a tierra).
- A continuación conectaremos el sensor ultrasónico que permitirá medir la distancia de los objetos próximos.
Imaxe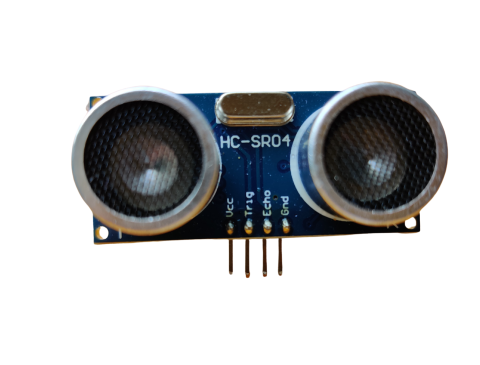
- El primer paso es colocar en la placa protoboard el sensor ultrasónico, dentro de la columna “a” y en las filas 24, 25, 26 y 27.
Imaxe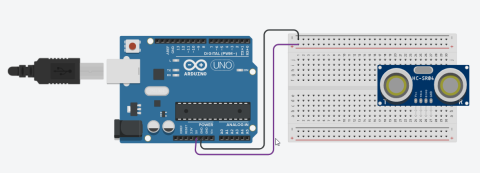
Después toca conectar el sensor a la toma de corriente. Para eso, precisaremos dos cables (macho – macho) de color morada y negra, y realizar las siguientes conexiones:
- Conexión con 5V (cable morado): un extremo del cable morado lo conectaremos en la placa protoboard en la columna “y” en la fila 24.
El otro extremo del cable morado lo conectaremos en la placa protoboard en la fila positiva, señalada con un símbolo más de color rojo, en la fila 24.
- Conexión con la tierra (cable negro): Un extremo del cable negro lo conectaremos en la placa protoboard en la columna “y” en la fila 27.
- El otro extremo del cable negro lo conectaremos en la placa protoboard en la fila negativa, señalada con un símbolo menos de color azul, en la fila 27.
Por último, tenemos que conectar el sensor con la placa Arduino Uno. Para eso, necesitaremos dos cables (macho – macho) de color azul y naranja, y realizar las siguientes conexiones:
- Conexión Trig (cable azul): Un extremo del cable azul lo conectaremos en la placa protoboard en la columna “y” en la fila 25.
El otro extremo del cable azul lo conectaremos en la placa Arduino Uno en el pin 2 digital.
- Conexión Echo (cable naranja): Un extremo del cable negro lo conectaremos en la placa protoboard en la columna “y” en la fila 26.
- El otro extremo del cable naranja lo conectaremos en la placa Arduino Uno en el pin 3 digital.
- Conexión del cableado sin mostrar el sensor de ultrasonidos:
Imaxe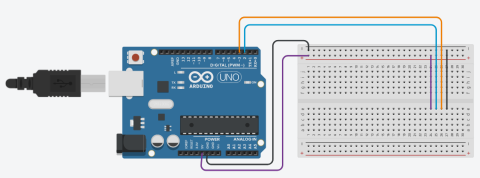 Imaxe
Imaxe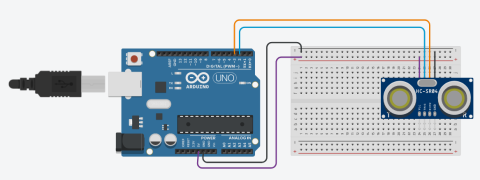
- A continuación conectaremos el sensor ultrasónico que permitirá medir la distancia de los objetos próximos.
- Paso 4
-
La configuración que estableceremos es la siguiente:
El led es un díodo que tiene dos patas, la pata más larga es la pata positiva (ánodo) y la pata más corta es la pata negativa (cátodo). Cada led trabaja a una voltaje específico (hace falta revisar las especificaciones) y varía según su color. Es importante emplear una resistencia para evitar que el led trabaje a una voltaje superior (5V) y acabe fundiéndose.
La siguiente tabla muestra los voltajes de trabajo de nuestras luces led y la resistencia que debemos emplear para trabajar con el voltaje adecuado.
Led (5 mm)
Voltaje
de trabajoIntensidad de trabajo
Resistencia
a emplearVerde
3,0 – 3,2 V
20 me la
100 Ω
Amarillo
2,0 – 2,2 V
20 me la
150 Ω
Rojo
2,0 – 2,2 V
20 me la
150 Ω
El primer paso es colocar las resistencias y los led en la placa protoboard, para eso debemos seguir los siguientes pasos:
A continuación, tenemos que conectar los leds con la placa Arduino Uno, para eso precisaremos tres cables (macho – macho) de color verde, amarillo y rojo:
El otro extremo del cable verde lo conectaremos en la placa Arduino Uno en el pin 4 digital.
El otro extremo del cable amarillo lo conectaremos en la placa Arduino Uno en el pin 5 digital.
El otro extremo del cable rojo lo conectaremos en la placa Arduino Uno en el pin 6 digital.
- El siguiente paso es conectar las luces led que mostrarán los avisos luminosos cuando nos aproximamos al obstáculo.
- Si el obstáculo está a más de 20 centímetros no se encenderá ninguna luz.
- Si el obstáculo está entre 10 y 20 centímetros, se encenderá la luz verde.
- Si el obstáculo está entre 5 y 9 centímetros, se encenderá la luz amarilla.
- Si el obstáculo está a menos de 5 centímetros, se encenderá la luz roja.
- Led verde:
- Pata larga del led verde (positiva) en la placa protoboard en la columna “a” de la fila 5.
- Pata corta del led verde (negativa) en la placa protoboard en la fila negativa, señalada con un símbolo menos de color azul, en la fila más próxima.
- Resistencia 100 Ω, una pata en la columna “d” de la fila 1 de la placa protoboard y otra pata en la columna “d” de la fila 5
- Led amarillo:
- Pata larga del led amarillo (positiva) en la placa protoboard en la columna “a” de la fila 10.
- Pata corta del led amarillo (negativa) en la placa protoboard en la fila negativa, señalada con un símbolo menos de color azul, en la fila más próxima.
- Resistencia 150 Ω, una pata en la columna “d” de la fila 6 de la placa protoboard y otra pata en la columna “d” de la fila 10.
- Led rojo:
- Pata larga del led rojo (positiva) en la placa protoboard en la columna “a” de la fila 15.
- Pata corta del led rojo (negativa) en la placa protoboard en la fila negativa, señalada con un símbolo menos de color azul, en la fila más próxima.
- Resistencia 150 Ω, una pata en la columna “d” de la fila 11 de la placa protoboard y otra pata en la columna “d” de la fila 15.
- Led verde (cable verde): Un extremo del cable verde lo conectaremos en la placa protoboard en la columna “y” en la fila 1.
- Led amarillo (cable amarillo): Un extremo del cable amarillo lo conectaremos en la placa protoboard en la columna “y” en la fila 6.
- Led rojo (cable rojo): Un extremo del cable rojo lo conectaremos en la placa protoboard en la columna “y” en la fila 11.
Imaxe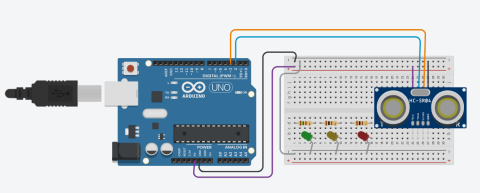
- El siguiente paso es conectar las luces led que mostrarán los avisos luminosos cuando nos aproximamos al obstáculo.
- Paso 5
-
- Tras finalizar el montaje del circuito, tenemos que cargar el programa que controla los diferentes componentes electrónicos y simula el funcionamiento del sensor de aparcamiento de un coche. Para cargar el programa en la placa Arduino Uno, debemos seguir los siguientes pasos:
- Conectar el cable USB en la placa Arduino y en el ordenador.
Imaxe
- Arrancar el programa Arduino ID.
Imaxe
- Abrir el programa facilitado, mediante la opción de menú Archivo > Abrir. Se abre un explorador de archivos donde debemos seleccionar el archivo ino.
Imaxe
- Seleccionar la placa Arduino Uno.
Imaxe
- Cargar el programa presionando en el icono Cargar.
Imaxe
- Se compila el programa y se carga en la placa Arduino. El proceso está listo cuando se muestra el mensaje: “Carga completada”.
Imaxe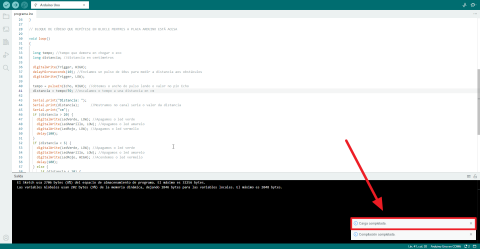
- Paso 6
-
- Ahora toca probar el funcionamiento de nuestro sistema. Para eso, debes acercar la mano al sensor de ultrasonidos poco a poco y comprobar que al superar los 20 centímetros se enciende el led verde. Tras superar los 10 centímetros, se enciende el led amarillo y se nos acercamos a más de 5 centímetros, se enciende el led rojo.
- También puedes comprobar en el Arduino ID la distancia a que está situado el obstáculo, en este caso a mano. Para eso debemos abrir el monitor serie. En el menú de la aplicación hace falta seleccionar la opción Herramientas > Monitor serie.
Imaxe Imaxe
Imaxe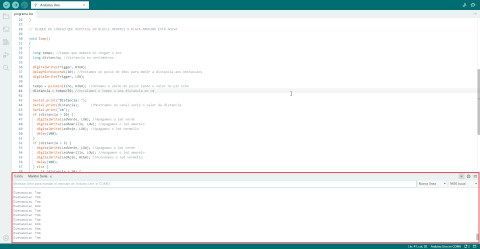
- Paso 7
-
- En las siguientes imágenes puedes observar como quedaría el montaje físico de los componentes en la placa protoboard y las conexiones con la placa Arduino:
- Conexiones de los componentes en la placa protoboard.
Imaxe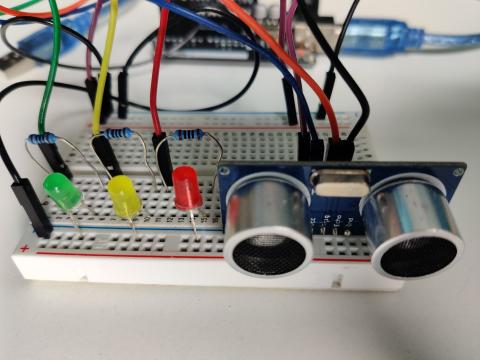 Imaxe
Imaxe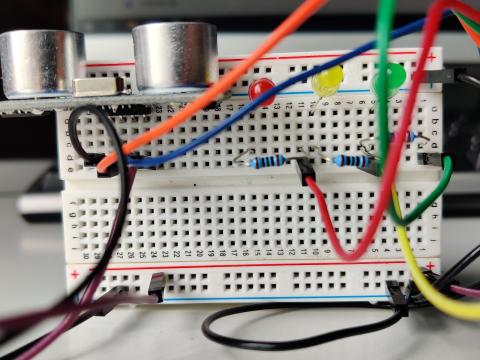
- Conexiones en la placa Arduino Uno.
Imaxe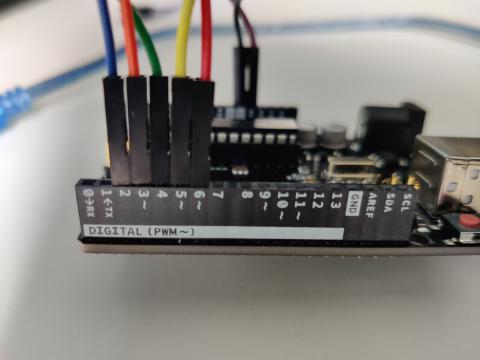 Imaxe
Imaxe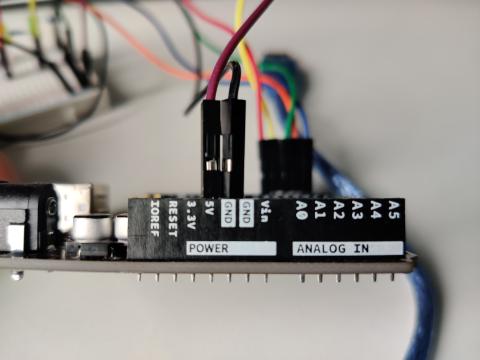
- Conexiones de la placa protoboard con la placa Arduino Uno.
Imaxe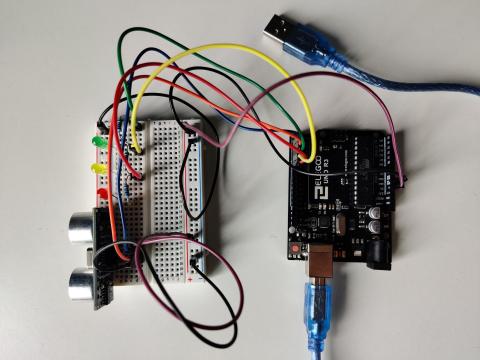
-
Tips docentes
Los tips del profesorado son pequeñas ayudas para desarrollar la estrategia educativa de forma adecuada.
punto 1, puede ser de interés comentar la filosofía del microcontrolador Arduino.
- La historia de la plataforma Arduino comienza a principios de los años 2000 en Ivrea, Italia. Un grupo de estudiantes y profesionales de la interacción y diseño industrial de la Escuela Superior de Diseño de Ivrea buscaban una forma de crear dispositivos fáciles de usar para sus proyectos.
- En este contexto de la necesidad de herramientas accesibles para prototipado rápido, nace el concepto de Arduino. El nombre "Arduino" viene del nombre de un bar italiano donde el equipo fundador se reunían para discutir y trabajar en sus proyectos.
- En 2005, el equipo lanzó la primera placa Arduino, con el nombre "Arduino NG" (Next Generation). La combinación de hardware de código abierto y un entorno de desarrollo amistoso hizo que la plataforma ganara popularidad rápidamente.
- Desde entonces, la familia de placas Arduino creció enormemente, incorporando nuevos modelos, funciones y características. La plataforma se convirtió en una herramienta fundamental para gran número de makers , estudiantes y profesionales en todo el mundo, permitiéndoles desarrollar proyectos electrónicos de todo tipo.
- Los diseños de las placas son públicos y abiertos, lo que facilita que existan muchas marcas que comercialicen las placas Arduino. Arduino comercializa sus propias placas que son muy fiables aunque algo más caras, ya que podemos encontrar placas basadas en Arduino más económicas, por ejemplo, de la marca ELEGOO.
- En la página oficial de Arduino podemos encontrar información de las diferentes placas: https://www.arduino.cc/
- Podemos realizar la siguiente actividad:
- Investigar con el alumnado las características del hardware de la placa Arduino y el funcionamiento básico de sus pins. Empleando la página: https://store.arduino.cc/products/arduino-uno-rev3?queryID=undefined
punto 2, puede ser de interés explicar el funcionamiento de una placa protoboard para crear prototipos de circuitos electrónicos rápidamente.
- Senderos de alimentación: En la protoboard , hay dos carriles principales de alimentación, uno para la tensión positiva (+) y otro para la tensión negativa (-). Estos carriles corren a lo largo de los bordes longitudinales de la placa. Puedes conectar la fuente de alimentación aquí para que los componentes de tu circuito puedan recibir energía eléctrica. Estos carriles son la base de la alimentación de energía para tus componentes.
- Senderos horizontales: Numerados comenzando en 1. Son diferentes filas de orificios horizontales que están conectadas entre sí, permitiendo la conexión de los componentes en serie.
- Senderos verticales: Identificados por letras, comenzando en “a”. Son diferentes columnas de orificios verticales. Existe un canal central en la mitad de la placa que separa los carriles verticales en dos bloques.
punto 3, se puede comentar al alumnado el funcionamiento del sensor de ultrasonidos.
El sensor de ultrasonidos es un dispositivo que utiliza ondas sonoras de alta frecuencia para medir la distancia entre el sensor y un objeto. Su funcionamiento se basa en dos fases principales: la emisión y la recepción de ultrasonidos.
- Emisión de ultrasonidos: El sensor de ultrasonidos emite un pulso de ondas sonoras de alta frecuencia. Este pulso viaja a través del aire hasta encontrar un objeto en su camino. La frecuencia empleada es normalmente superior a la que el oído humano puede escuchar, por lo que no percibimos el sonido emitido por el sensor.
- Recepción de ultrasonidos: Una vez emitido el pulso, el sensor espera la que las ondas reboten en un objeto y vuelvan al sensor. Cuando las ondas sonoras chocan con un objeto, se reflejan y regresan al sensor. El sensor tiene un elemento receptor que captura estas ondas de vuelta.
El sensor mide el tiempo que transcurre entre la emisión y la recepción de las ondas sonoras. Al multiplicar el tiempo transcurrido por la velocidad del sonido (aproximadamente 343 metros por segundo a 20°C), el sensor calcula la distancia entre el sensor y el objeto. Esta distancia es una aproximación de la posición del objeto respeto al sensor.
Podemos preguntar:
- Que otros usos podrían aplicarse al sensor de ultrasonidos?.
Respuesta:
- Detección de objetos en coches para ayudar en la maniobra de aparcamiento.
- Control de ascensores en edificios y centros comerciales para asegurarse de que los ascensores se detienen correctamente en la planta indicada y evitan colisiones con las puertas y objetos.
- Los robots emplean sensores de ultrasonidos para detectar objetos y evitar colisiones mientras se mueven. Esto es útil en robots de limpieza, robots aspiradores y otros dispositivos que necesitan navegar en espacios con obstáculos.
- En tanques o depósitos, los sensores de ultrasonidos pueden medir el nivel de líquidos como agua o combustible.
- Detección de personas en sistemas de seguridad para evitar robos.
- En aplicaciones agrícolas, los sensores de ultrasonidos pueden medir la altura de las plantas y ayudar en la monitorización de sus condiciones de crecimiento.
punto 6, se puede proyectar el vídeo que resume el funcionamiento de nuestro sistema simulador del aparcamiento de un coche.
Tu clase en un clic
Implementa esta microsecuencia en tu aula Moodle (Descarga disponible en gallego o castellano ).
|
Imaxe
 |
Imaxe
 |