
Nesta experiencia coñeceremos o funcionamento do sensor de aparcamento dun coche. Empregando o microcontrolador Arduino Uno e diferentes compoñentes electrónicos, construiremos un sistema que mostre un aviso luminoso cando nos achegamos a un obstáculo. Será preciso cargar un sinxelo programa na placa Arduino Uno para que o noso sistema simule o funcionamento do sensor de aparcamento dun coche.

Cesta de materiais
Preme nos puntos interactivos da imaxe.
Mans á obra
- Paso 1
-
- Para aprender o funcionamento do sensor ultrasónico que empregan os coches para detectar os obstáculos próximos e facilitar o aparcamento, empregaremos o microcontrolador Arduino Uno.
- A placa Arduino Uno permite crear un circuíto electrónico con diferentes compoñentes electrónicos (sensor de ultrasóns, luces led, resistencias e cableado) e subir un código ou programa á placa que controle o funcionamento do circuíto. Nesta microsecuencia construiremos un circuíto que simule o funcionamento do sensor de aparcamento dun coche e despois subiremos a placa ao programa que controle o seu funcionamento (programa facilitado na microsecuencia).
- Paso 2
-
- Para comezar, precisamos a placa do microcontrolador Arduino Uno e a placa protoboard onde conectaremos os diferentes compoñentes electrónicos.
- Para que sexa máis sinxelo seguir os pasos da montaxe do circuíto, as imaxes están realizadas cun simulador de deseño de circuítos en liña (Tinkercad).
Imaxe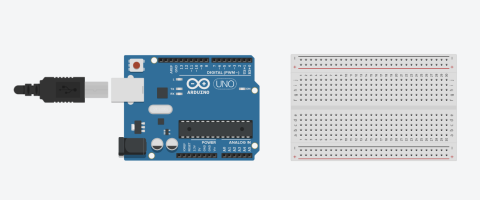
O primeiro paso é darlle corrente a placa protoboard. Para iso precisamos dous cables (macho-macho) de cor negro e morado. Faremos as conexións da seguinte forma:
- Conexión con 5V (cable morado): Un extremo do cable morado conectarémolo na placa Arduino Uno no pin 5V.
O outro extremo do cable morado conectarémolo na placa protoboard na ringleira positiva, sinalada cun símbolo de máis de cor vermello, na fila 1 (preto da columna con letra j).
- Conexión coa terra (cable negro): Un extremo do cable negro conectarémolo na placa Arduino Uno no pin GND (próximo ao pin 5V).
O outro extremo do cable negro conectarémolo na placa protoboard na ringleira negativa, sinalada cun símbolo menos de cor azul, na fila 1 (preto da columna con letra j).
Con isto a placa protoboard xa ten conexión de corrente de 5V na ringleira positiva e conexión coa terra da placa Arduino na ringleira GND.
Imaxe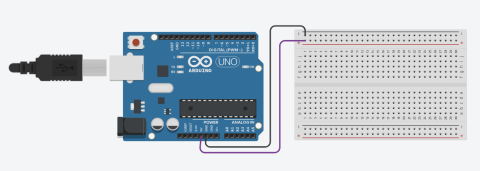
- Paso 3
-
O sensor de proximidade ten catro pins: VCC (alimentación de corrente), Trig (Pin de entrada), Echo (Pin de saída), Gnd (Conexión a terra).
- A continuación conectaremos o sensor ultrasónico que permitirá medir a distancia dos obxectos próximos.
Imaxe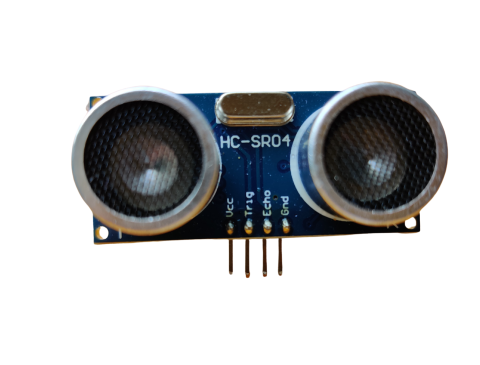
- O primeiro é colocar na placa protoboard o sensor ultrasónico, dentro da columna “a” e nas ringleiras 24, 25, 26 e 27.
Imaxe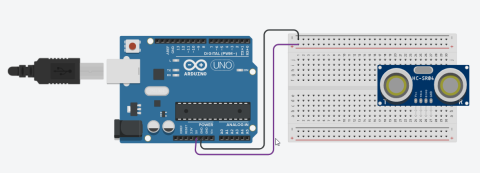
Despois toca conectar o sensor á toma de corrente. Para iso, precisaremos dous cables (macho – macho) de cor morada e negra, e realizar as seguintes conexións:
- Conexión con 5V (cable morado): un extremo do cable morado conectarémolo na placa protoboard na columna “e” na ringleira 24.
O outro extremo do cable morado conectarémolo na placa protoboard na ringleira positiva, sinalada cun símbolo máis de cor vermello, na fila 24.
- Conexión coa terra (cable negro): Un extremo do cable negro conectarémolo na placa protoboard na columna “e” na ringleira 27.
- O outro extremo do cable negro conectarémolo na placa protoboard na ringleira negativa, sinalada cun símbolo menos de cor azul, na fila 27.
Por último, temos que conectar o sensor coa placa Arduino Uno. Para iso, precisaremos dous cables (macho – macho) de cor azul e laranxa, e realizar as seguintes conexións:
- Conexión Trig (cable azul): Un extremo do cable azul conectarémolo na placa protoboard na columna “e” na ringleira 25.
O outro extremo do cable azul conectarémolo na placa Arduino Uno no pin 2 dixital.
- Conexión Echo (cable laranxa): Un extremo do cable negro conectarémolo na placa protoboard na columna “e” na ringleira 26.
- O outro extremo do cable laranxa conectarémolo na placa Arduino Uno no pin 3 dixital.
- Conexión do cableado sen mostrar o sensor de ultrasóns:
Imaxe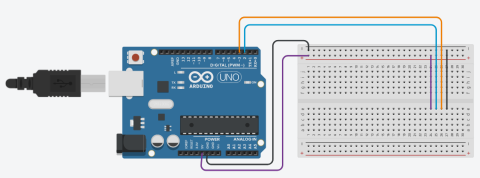 Imaxe
Imaxe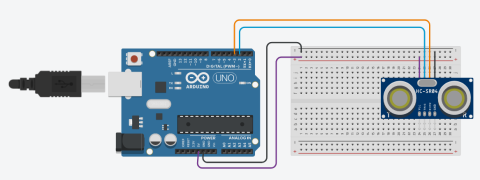
- A continuación conectaremos o sensor ultrasónico que permitirá medir a distancia dos obxectos próximos.
- Paso 4
-
A configuración que estableceremos é a seguinte:
O led é un díodo que ten dúas patas, a pata máis longa é a pata positiva (ánodo) e a pata máis curta é a pata negativa (cátodo). Cada led traballa a unha voltaxe específica (cómpre revisar as especificacións) e varía segundo a súa cor. É importante empregar unha resistencia para evitar que o led traballe a unha voltaxe superior (5V) e acabe fundíndose.
A seguinte táboa amosa as voltaxes de traballo das nosas luces led e a resistencia que debemos empregar para traballar coa voltaxe adecuada.
Led (5 mm)
Voltaxe
de traballoIntensidade de traballo
Resistencia
a empregarVerde
3,0 – 3,2 V
20 mA
100 Ω
Amarelo
2,0 – 2,2 V
20 mA
150 Ω
Vermello
2,0 – 2,2 V
20 mA
150 Ω
O primeiro paso é colocar as resistencias e os led na placa protoboard, para iso debemos seguir os seguintes pasos:
A continuación, temos que conectar os leds coa placa Arduino Uno, para iso precisaremos tres cables (macho – macho) de cor verde, amarelo e vermello:
O outro extremo do cable verde conectarémolo na placa Arduino Uno no pin 4 dixital.
O outro extremo do cable amarelo conectarémolo na placa Arduino Uno no pin 5 dixital.
O outro extremo do cable vermello conectarémolo na placa Arduino Uno no pin 6 dixital.
- O seguinte paso é conectar as luces led que mostrarán os avisos luminosos cando nos aproximamos ao obstáculo.
- Se o obstáculo está a máis de 20 centímetros non se acenderá ningunha luz.
- Se o obstáculo está entre 10 e 20 centímetros, acenderase a luz verde.
- Se o obstáculo está entre 5 e 9 centímetros, acenderase a luz amarela.
- Se o obstáculo está a menos de 5 centímetros, acenderase a luz vermella.
- Led verde:
- Pata longa do led verde (positiva) na placa protoboard na columna “a” da ringleira 5.
- Pata curta do led verde (negativa) na placa protoboard na ringleira negativa, sinalada cun símbolo menos de cor azul, na fila máis próxima.
- Resistencia 100 Ω, unha pata na columna “d” da ringleira 1 da placa protoboard e outra pata na columna “d” da ringleira 5
- Led amarelo:
- Pata longa do led amarelo (positiva) na placa protoboard na columna “a” da ringleira 10.
- Pata curta do led amarelo (negativa) na placa protoboard na ringleira negativa, sinalada cun símbolo menos de cor azul, na fila máis próxima.
- Resistencia 150 Ω, unha pata na columna “d” da ringleira 6 da placa protoboard e outra pata na columna “d” da ringleira 10.
- Led vermello:
- Pata longa do led vermello (positiva) na placa protoboard na columna “a” da ringleira 15.
- Pata curta do led vermello (negativa) na placa protoboard na ringleira negativa, sinalada cun símbolo menos de cor azul, na fila máis próxima.
- Resistencia 150 Ω, unha pata na columna “d” da ringleira 11 da placa protoboard e outra pata na columna “d” da ringleira 15.
- Led verde (cable verde): Un extremo do cable verde conectarémolo na placa protoboard na columna “e” na ringleira 1.
- Led amarelo (cable amarelo): Un extremo do cable amarelo conectarémolo na placa protoboard na columna “e” na ringleira 6.
- Led vermello (cable vermello): Un extremo do cable vermello conectarémolo na placa protoboard na columna “e” na ringleira 11.
Imaxe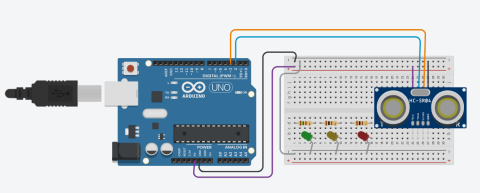
- O seguinte paso é conectar as luces led que mostrarán os avisos luminosos cando nos aproximamos ao obstáculo.
- Paso 5
-
- Tras finalizar a montaxe do circuíto, temos que cargar o programa que controla os diferentes compoñentes electrónicos e simula o funcionamento do sensor de aparcamento dun coche. Para cargar o programa na placa Arduino Uno, debemos seguir os seguintes pasos:
- Conectar o cable USB na placa Arduino e no ordenador.
Imaxe
- Arrancar o programa Arduino IDE.
Imaxe
- Abrir o programa facilitado, mediante a opción de menú Arquivo > Abrir. Ábrese un explorador de arquivos onde debemos seleccionar o arquivo ino.
Imaxe
- Seleccionar a placa Arduino Uno.
Imaxe
- Cargar o programa premendo na icona Cargar.
Imaxe
- Compílase o programa e cárgase na placa Arduino. O proceso está listo cando se mostra a mensaxe: “Carga completada”.
Imaxe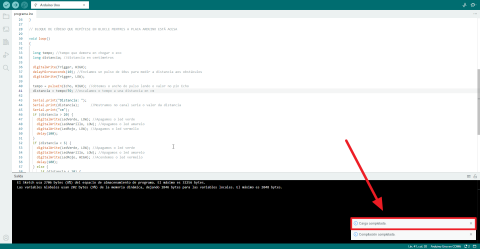
- Paso 6
-
- Agora toca probar o funcionamento do noso sistema. Para iso, debes achegar a man ao sensor de ultrasóns pouco a pouco e comprobar que ao superar os 20 centímetros se acende o led verde. Tras superar os 10 centímetros, acéndese o led amarelo e se nos achegamos a máis de 5 centímetros, acéndese o led vermello.
- Tamén podes comprobar no Arduino IDE a distancia a que está situado o obstáculo, neste caso a man. Para iso debemos abrir o monitor serie. No menú da aplicación cómpre seleccionar a opción Ferramentas > Monitor serie.
Imaxe Imaxe
Imaxe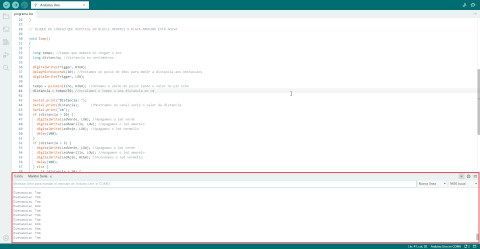
- Paso 7
-
- Nas seguintes imaxes podes observar como quedaría a montaxe física dos compoñentes na placa protoboard e as conexións coa placa Arduino:
- Conexións dos compoñentes na placa protoboard.
Imaxe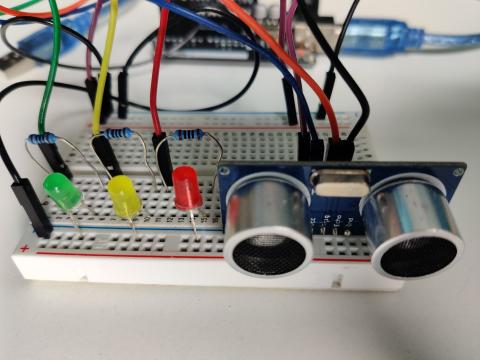 Imaxe
Imaxe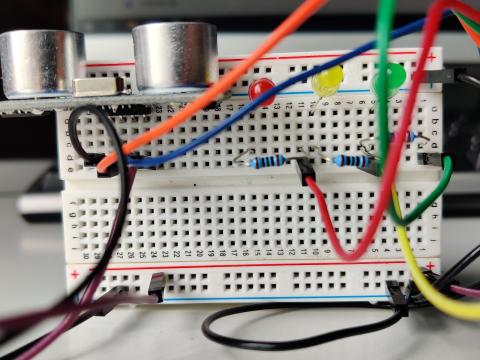
- Conexións na placa Arduino Uno.
Imaxe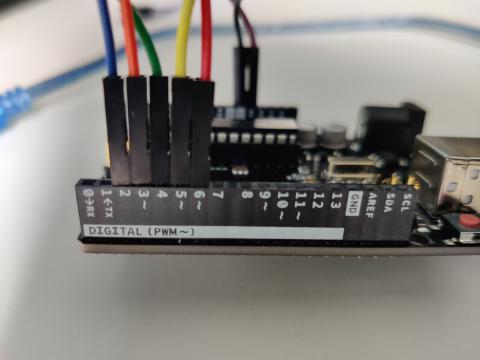 Imaxe
Imaxe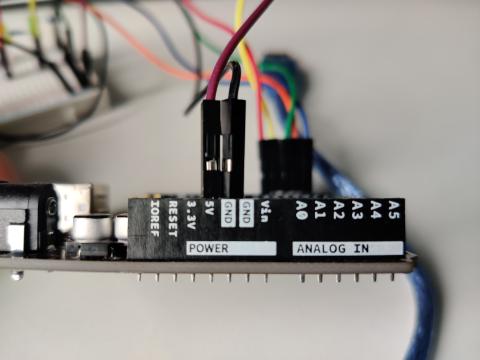
- Conexións da placa protoboard coa placa Arduino Uno.
Imaxe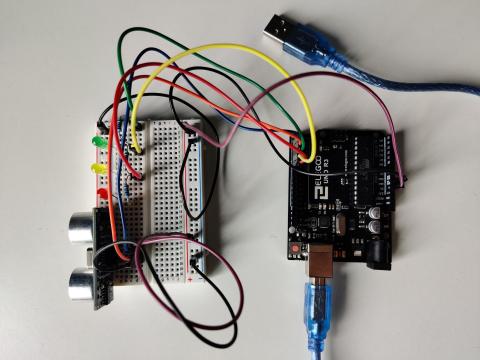
-
Tips docentes
Os tips do profesorado son pequenas axudas para desenvolver a estratexia educativa de forma adecuada.
No punto 1, pode ser de interese comentar a filosofía do microcontrolador Arduino.
- A historia da plataforma Arduino comeza a principios dos anos 2000 en Ivrea, Italia. Un grupo de estudantes e profesionais da interacción e deseño industrial da Escola Superior de Deseño de Ivrea buscaban unha forma de crear dispositivos fáciles de usar para os seus proxectos.
- Neste contexto da necesidade de ferramentas accesibles para prototipado rápido, nace o concepto de Arduino. O nome "Arduino" vén do nome dun bar italiano onde o equipo fundador se reunían para discutir e traballar nos seus proxectos.
- En 2005, o equipo lanzou a primeira placa Arduino, co nome "Arduino NG" (Next Generation). A combinación de hardware de código aberto e unha contorna de desenvolvemento amigable fixo que a plataforma gañase popularidade rapidamente.
- Desde entón, a familia de placas Arduino medrou enormemente, incorporando novos modelos, funcións e características. A plataforma converteuse nunha ferramenta fundamental para gran número de makers, estudantes e profesionais en todo o mundo, permitíndolles desenvolver proxectos electrónicos de todo tipo.
- Os deseños das placas son públicos e abertos, o que facilita que existan moitas marcas que comercialicen as placas Arduino. Arduino comercializa as súas propias placas que son moi fiables aínda que algo máis caras, xa que podemos atopar placas baseadas en Arduino máis económicas, por exemplo, da marca ELEGOO.
- Na páxina oficial de Arduino podemos atopar información das diferentes placas: https://www.arduino.cc/
- Podemos realizar a seguinte actividade:
- Investigar co alumnado as características do hardware da placa Arduino e o funcionamento básico dos seus pins. Empregando a páxina: https://store.arduino.cc/products/arduino-uno-rev3?queryID=undefined
No punto 2, pode ser de interese explicar o funcionamento dunha placa protoboard para crear prototipos de circuítos electrónicos rapidamente.
- Carreiros de alimentación: Na protoboard, hai dous carrís principais de alimentación, un para a tensión positiva (+) e outro para a tensión negativa (-). Estes carrís corren ao longo dos bordos lonxitudinais da placa. Podes conectar a fonte de alimentación aquí para que os compoñentes do teu circuíto poidan recibir enerxía eléctrica. Estes carrís son a base da alimentación de enerxía para os teus compoñentes.
- Carreiros horizontais: Numerados comezando en 1. Son diferentes filas de orificios horizontais que están conectadas entre si, permitindo a conexión dos compoñentes en serie.
- Carreiros verticais: Identificados por letras, comezando en “a”. Son diferentes columnas de orificios verticais. Existe un canal central na metade da placa que separa os carrís verticais en dous bloques.
No punto 3, pódese comentar ao alumnado o funcionamento do sensor de ultrasóns.
O sensor de ultrasóns é un dispositivo que utiliza ondas sonoras de alta frecuencia para medir a distancia entre o sensor e un obxecto. O seu funcionamento baséase en dúas fases principais: a emisión e a recepción de ultrasóns.
- Emisión de ultrasóns: O sensor de ultrasóns emite un pulso de ondas sonoras de alta frecuencia. Este pulso viaxa a través do aire ata atopar un obxecto no seu camiño. A frecuencia empregada é normalmente superior á que o oído humano pode escoitar, polo que non percibimos o son emitido polo sensor.
- Recepción de ultrasóns: Unha vez emitido o pulso, o sensor agarda a que as ondas reboten nun obxecto e volvan ao sensor. Cando as ondas sonoras chocan cun obxecto, reflíctense e regresan ao sensor. O sensor ten un elemento receptor que captura estas ondas de volta.
O sensor mide o tempo que transcorre entre a emisión e a recepción das ondas sonoras. Ao multiplicar o tempo transcorrido pola velocidade do son (aproximadamente 343 metros por segundo a 20°C), o sensor calcula a distancia entre o sensor e o obxecto. Esta distancia é unha aproximación da posición do obxecto respecto ao sensor.
Podemos preguntar:
- Que outros usos poderían aplicarse ao sensor de ultrasóns?.
Resposta:
- Detección de obxectos en coches para axudar na manobra de aparcamento.
- Control de ascensores en edificios e centros comerciais para asegurarse de que os ascensores se deteñen correctamente no andar e evitan colisións coas portas e obxectos.
- Os robots empregan sensores de ultrasóns para detectar obxectos e evitar colisións mentres se moven. Isto é útil en robots de limpeza, robots aspiradores e outros dispositivos que necesitan navegar en espazos con obstáculos.
- En tanques ou depósitos, os sensores de ultrasóns poden medir o nivel de líquidos como auga ou combustible.
- Detección de persoas en sistemas de seguridade para evitar roubos.
- En aplicacións agrícolas, os sensores de ultrasóns poden medir a altura das plantas e axudar na monitorización das súas condicións de crecemento.
No punto 6, pódese proxectar o vídeo que resume o funcionamento do noso sistema simulador do aparcamento dun coche.
A túa clase nun clic
Implementa esta microsecuencia na túa aula Moodle (Descarga dispoñible en galego ou castelán).
|
Imaxe
 |
Imaxe
 |