
En esta microsecuencia usaremos un mBot para programar en mBlock el funcionamiento de un robot aspirador. Esto nos permitirá partir de un ser del entorno (murciélago-ecolocalizador) para relacionarlo con un elemento de uso común (robot aspirador).

Cesta de materiales
Presiona en los puntos interactivos de la imagen.
Manos a la obra
- Paso 1
-
- Comprender y valorar la importancia de los seres vivos para adaptar nuestro entorno a nuestras necesidades. Ver cómo se orientan los murciélagos (ecolocalización).
- Procurar objetos reales que empleen sensores semejantes (robot aspirador, sensor de aparcamiento de coches...).
- Proponer el reto de crear un robot aspirador programando el mBot en mBlock mediante bloques.
- Valorar y precisar variables necesarias y llevar a cabo la programación. En este caso, emplearemos el sensor de ultrasonidos para que el robot gire a una determinada distancia de un obstáculo y así logre evitarlo.
Imaxe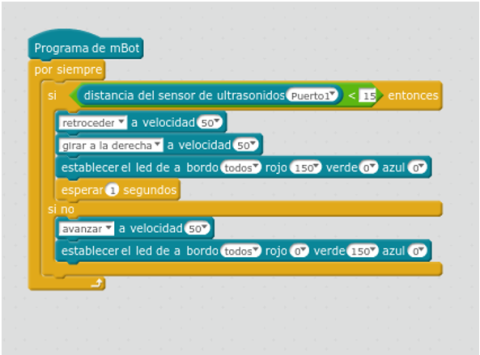
- Paso 2
-
- Cargar el programa en el robot y comprobar que funciona.
Imaxe
-
- Paso 3
-
- Posibilidad de diseñar o reutilizar un cepillo para comprobar el correcto funcionamiento y ver la funcionalidad del mismo.
-
-
Tips docentes
Los tips del profesorado son pequeñas ayudas para desarrollar la estrategia educativa de forma adecuada.
Es necesario tener ciertas habilidades de programación mediante bloques (en esta ocasión se emplea un único sensor: el sensor de ultrasonidos).
Se podría perfeccionar la programación y diseño conforme a la finalidad esperada del robot y en función del uso que le queramos dar (personalización).
Posibilidad de emplear colores y/o sonidos de tal manera que nos permita percibir de alguna manera adicional cuando el robot experimenta un cambio de acción.
Tu clase en un clic
Implementa esta microsecuencia en tu aula Moodle (Descarga disponible en gallego o castellano ).
|
Imaxe
 |
Imaxe
 |